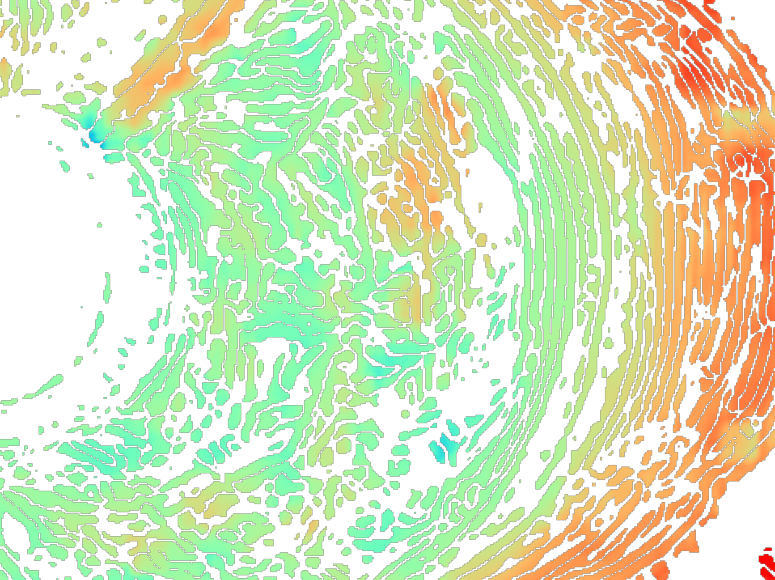
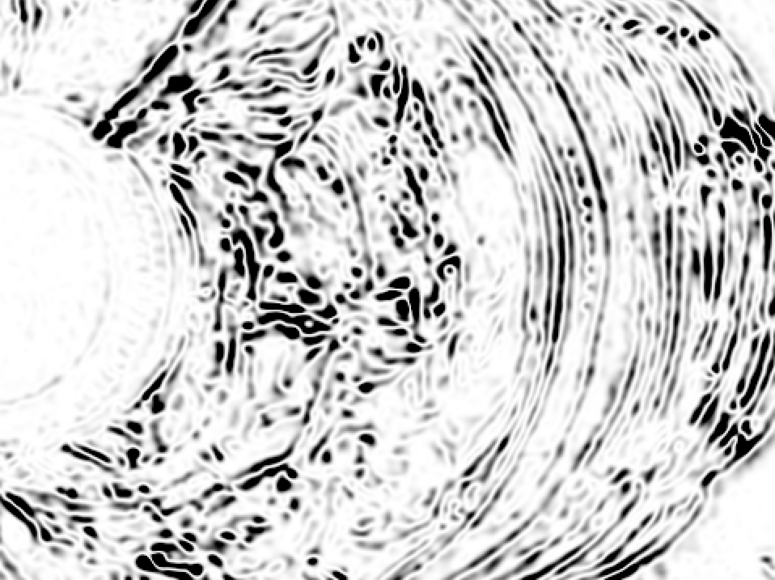
Real-World Images & Depth Maps
Explore our dataset of captured image pairs and corresponding depth-related maps. Click on thumbnails to view full images or download files.
| Name | Image 1 | Image 2 | Aligned Image 2 | Reference Depth | Confidence Map | Predicted Depth |
|---|---|---|---|---|---|---|
| CVPR |

|

|

|
|

|
|
| keyboard |

|
|
|
|

|
|
| Pokemon |

|

|

|
|

|
|
| ruler |
|

|
|
|
|
|
| snack |
|
|
|
|

|
|
| waterbottle |

|
|

|
|
|
|
import cv2
import matplotlib.pyplot as plt
# TDB